複數和相量
電氣工程中使用的數學用於將電阻、電流或直流電壓等相加時,使用的是所謂的“實數”,要麼是整數,要麼是分數。
但實數並不是我們需要使用的唯一數字,特別是在處理頻率相關的正弦波和向量時。同使用實數一樣,複數被引入來求解複數的方程式,用負數的平方根號碼來解決,√-1。
在電氣工程中,這種型別的數字被稱為“虛數”,並且為了將虛數與實數區分開,使用在電氣工程中通常用字母 j 作為 j 運算子。因此,字母 j 被放置在實數的前面以表示其虛數操作。
虛數的例子是: j3,j12,j100 等。然後,複數由兩個不同但非常相關的部分組成,實數加上虛數。
複數表示二維複數或 s 平面中以兩個不同軸為參考的點。橫軸稱為“實軸”,而縱軸稱為“虛軸”。複數的實部和虛部分別縮寫為 Re(z) 和 Im(z)。
由實數(有源分量)和虛數(無功分量)陣列成的複數可以與基本代數用於分析直流電路完全相同的方式相加、相減。
數學中用於虛數加法或減法的規則和定律與實數相同,j2 + j4 = j6 等。唯一的區別在於乘法,因為兩個虛數相乘成為負實數。實數也可以被認為是一個複數,但虛部為零,標記為 j0。
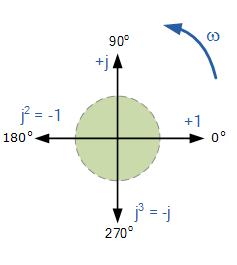
j 運算子的值等於√-1,兩個 j 相乘將得到 -1,三個 j 相乘為 -j,四個為 1。由於 j 運算子通常用於指示向量的逆時針旋轉,因此每個連續乘法為 j,j2,J3 等,將迫使向量在逆時針方向上旋轉 90o 的固定角度,如下所示。同樣地,如果在一個向量上乘以 -j ,相移將為 -90o,即順時針方向旋轉。
向量旋轉 j 運算子
| 旋轉角度 | 向量表達 |
|---|---|
| 90 | $j ^ { 1 } = \sqrt { - 1 } = + j$ |
| 180 | $j ^ { 2 } = ( \sqrt { - 1 } ) ^ { 2 } = - 1$ |
| 270 | $j ^ { 3 } = ( \sqrt { - 1 } ) ^ { 3 } = - j$ |
| 360 | $j ^ { 4 } = ( \sqrt { - 1 } ) ^ { 4 } = + 1$ |
因此,通過乘以虛數 j2 將逆時針旋轉向量 180o ,乘以 j3 時旋轉 270o,乘以 j4 時旋轉 360o,或回到其原始位置。乘以 j10 或 j30 將使向量逆時針旋轉適當的量。在每次連續旋轉中,向量的大小始終保持不變。
在電氣工程中,有不同的方式以圖形或數學方式表示複數。使用餘弦和正弦規則的一種方法稱為笛卡爾或矩形形式。
使用矩形形式的複數
在上一篇關於相量 的教程中,我們看到一個複數由一個實部和一個虛部表示,它採用以下的通用形式:
$$ Z = x + j y $$
其中,
- Z 是表示向量的複數
- x 是實數部分或有功部分
- y 是虛部或無功部分
- j 是 √-1
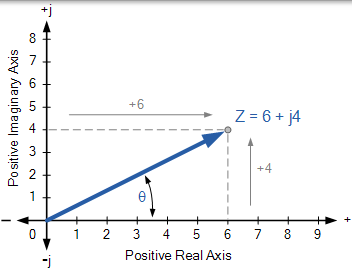
在矩形形式中,複數可以由被稱為複數或** s 平面的**二維平面上的點來表示。因此,例如,Z = 6 + j4表示的點,其座標在水平實軸上是6,在垂直虛軸上是4,如圖所示。
使用 Complex 或 s-plane 的複數
但由於矩形形式的複數的實部和虛部都可以是正數或負數,因此實軸和虛軸也必須在正方向和負方向上延伸。然後,這將產生一個複雜的平面,其中有四個象限,稱為阿幹特圖,如下所示。
四象限阿幹特圖

在 Argand 圖上,橫軸表示垂直虛軸右側的所有正實數和垂直虛軸左側的所有負實數。所有正虛數都表示在水平軸上方,而所有負虛數都在水平實軸之下。然後,這產生具有標記為 QI,QII,QIII 和 QIV 的四個不同象限的二維複平面。
上面的 Argand 圖也可用於表示旋轉相量作為複平面中的一個點,其半徑由相量的大小給出,每 2π/ω 秒將圍繞它繪製一個完整的圓。
然後,我們可以進一步擴充套件這種想法來表示複數的定義,同時在極座標和矩形表示上來表示 90o 的旋轉。
$$ \begin{aligned} 0 ^ { \circ } & = \pm 360 ^ { \circ } = + 1 = 1 \angle 0 ^ { \circ } = 1 + j 0 \\ + 90 ^ { \circ } & = + \sqrt { - 1 } = + \mathrm { j } = 1 \angle + 90 ^ { \circ } = 0 + \mathrm { j } 1 \\ - 90 ^ { \circ } & = - \sqrt { - 1 } = - \mathrm { j } = 1 \angle - 90 ^ { \circ } = 0 - \mathrm { j } 1 \\ \pm 180 ^ { \circ } & = ( \sqrt { - 1 } ) ^ { 2 } = - 1 = 1 \angle \pm 180 ^ { \circ } = - 1 + \mathrm { j } 0 \end{aligned} $$
複數也可以具有“零”實部或虛部,例如: Z = 6 + j0 或 Z = 0 + j4。在這種情況下,點直接繪製在實軸或虛軸上。此外,可以使用簡單的三角法計算複數的角度以計算直角三角形的角度,或者從正實軸開始圍繞 Argand 圖逆時針測量。
然後 0 和 90o 的角度在第一象限, 90 和 180o 之間的角度在第二象限。第三象限包括 180 和 270o 之間的角度,而第四象限包括 270 和 360o 之間的角度 等。在所有四個象限中,相關角度可以從以下位置找到:
tan-1(虛部÷實部)
複數的加法和減法
複數的加或減可以數學方式或以矩形形式以圖形方式完成。另外,首先將實部加在一起形成和的實部,然後將虛部加在和的虛部上,這個過程如下,用兩個複數 A 和 B 作為例子。
複數加法和減法
$$ \begin{array} { c } { A = x + j y \quad B = W + j Z } \\ { A + B = ( x + w ) + j ( y + z ) } \\ { A - B = ( x - W ) + j ( y - z ) } \end{array} $$
複數示例 No1
兩個向量分別定義為 A = 4 + j1 和 B = 2 + j3。以矩形( a + jb)形式確定兩個向量的和與差,並以圖形方式確定為 Argand 圖。
數學加法和減法
- 加法
$$ \begin{array} { l } { A + B = ( 4 + j 1 ) + ( 2 + j 3 ) } \\ { A + B = ( 4 + 2 ) + j ( 1 + 3 ) = 6 + j 4 } \end{array} $$
- 減法
\begin{array} { l } { A - B = ( 4 + j 1 ) - ( 2 + j 3 ) } \\ { A + B = ( 4 - 2 ) + j ( 1 - 3 ) = 2 - j 2 } \end{array}
圖形加法和減法

複數的乘法和除法
矩形形式的複數的乘法遵循與正常代數大致相同的規則以及 j 運算子的連續乘法的一些附加規則,其中: j2 = -1。因此,例如將 A = 4 + j1 和 B = 2 + j3 兩個向量相乘將得到以下結果。
$$ \begin{aligned} \mathrm { A } \times \mathrm { B } & = ( 4 + j 1 ) ( 2 + j 3 ) \\ & = 8 + j 12 + j 2 + j ^ { 2 } 3 \\ & = 8 + j 14 -3 \\ & = 5 + j 14 \end{aligned} $$
在數學上,矩形形式的複數的除法更難以計算,因為它需要使用分母共軛函式將等式的分母轉換為實數。這被稱為“合理化”。然後,複數的除法最好使用極座標進行,我們將在後面介紹。然而,如在矩形形狀的例子,我們來計算向量 A 除以向量 B 的結果。
$$ \frac { A } { B } = \frac { 4 + j } { 2 + j 3 } $$
分子分母都乘以共軛複數 2 + j3,
$$ \begin{aligned} \frac { 4 + j 1 } { 2 + j } \times \frac { 2 - j 3 } { 2 - j 3 } & = \frac { 8 - j 12 + j 2 - j ^ { 2 } 3 } { 4 - j 6 + j 6 - j ^ { 2 } 9 } \\ & = \frac { 8 - j 10 + 3 } { 4 + 9 } \\ & = \frac { 11 - j 10 } { 13 } \\ & = \frac { 11 } { 13 } + \frac { - j 10 } { 13 } = 0.85 - j 0.77 \end{aligned} $$
複合共軛
共軛複數,通過反轉同時保持實數的代數符號相同,將虛數的代數符號取反來得到,用符號$\overline { \textrm {z} }$來表示。例如,Z = 6 + J4 的共軛是 $\overline { \textrm {z} }$ = 6 - J4,同樣的,Z = -6 - J4 的共軛是 $\overline { \textrm {z} }$ = 6 + J4。
複數共軛的 Argand 圖上的點在實軸上的水平位置與原始複數相同,但垂直位置相反。因此,複共軛可以被認為是複數的反射。以下示例顯示覆數 6 + j4 及其在複平面中的共軛。
共軛複數

如上所述,複數與其複共軛的總和將始終為實數。然後,複數和其共軛的加法僅將結果作為實數或有效分量,而它們的減法僅給出虛數或無功分量。複數的共軛是電氣工程中用於確定使用矩形形式的 AC 電路的視在功率的重要元件。
使用極座標形式的複數
與繪製複平面中的點的矩形不同,複數的極座標形式是根據其大小和角度來編寫的。因此,極座標形式向量表示為:Z =A∠±θ,其中: Z 是極座標形式的複數,A 是向量的大小或模, θ 是 A 的角度,它可以是正的也可以是負的。該點的大小和角度仍然與上面的矩形形式相同,這次以極座標形式,該點的位置以“三角形”表示,如下所示。
複數的極座標表示

由於點的極座標表示基於三角形,我們可以使用三角形的簡單幾何知識,特別是三角形和三角形的畢達哥拉斯定理來找到複數的大小和角度。正如我們從學校記得的那樣,三角學處理三角形的邊和角度之間的關係,因此我們可以將邊之間的關係描述為:
$$ \begin{array} { l } { \mathrm { A } ^ { 2 } = \mathrm { x } ^ { 2 } + \mathrm { y } ^ { 2 } } \ { \mathrm { A } = \sqrt { \mathrm { x } ^ { 2 } + \mathrm { y } ^ { 2 } } } \end{array} $$
這裡,$x = Acos \theta, y = Asin \theta$
再次使用三角學,A 的角度 θ 的可以求出來,
$$ \theta = \tan ^ { - 1 } \frac { \mathrm { y } } { \mathrm { x } } $$
然後在極座標形式中,A 的長度及其角度而不是而不是點來表示複數。此外,在極座標形式的複數的共軛具有相同的幅度或模,但角度的正負相反,所以示例 6∠30o 的共軛是 6∠-30o。
在矩形形式和極座標形式之間轉換
在矩形形式中,我們可以根據其直角座標表示向量,水平軸是其實軸,垂直軸是其虛軸或 j 分量。在極座標形式中,這些實軸和虛軸簡單地用 A∠θ 表示。然後使用上面的例子,矩形和極形之間的關係可以定義為。
將極座標轉換為矩形,(P→R)
$$ 6 \angle 30 ^ { \circ } = \mathrm { x } + \mathrm { jy } $$
但是,
$$ \mathrm { x } = \mathrm { A } \cos \theta \quad \mathrm { y } = \mathrm { A } \sin \theta $$
所以,
$$ \begin{aligned} 6 \angle 30 ^ { 0 } & = ( 6 \cos \theta ) + j ( 6 \sin \theta ) \\ & = \left( 6 \cos 30 ^ { \circ } \right) + j \left( 6 \sin 30 ^ { \circ } \right) \\ & = ( 6 \times 0.866 ) + j ( 6 \times 0.5 ) \\ & = 5.2 + j 3 \end{aligned} $$
我們還可以將矩形形式轉換回極性形式,如下所示。
將矩形轉換為極座標形式,(R→P)
$$ ( 5.2 + j 3 ) = A \angle \theta $$
其中,
$$ A = \sqrt { 5.2 ^ { 2 } + 3 ^ { 2 } } = 6 \\ \theta = \tan ^ { - 1 } \frac { 3 } { 5.2 } = 30 ^ { \circ } $$
所以,
$$ ( 5.2 + j 3 ) = 6 \angle 30 ^ { 0 } $$
極座標形式乘法和除法
如上所述,矩形形式最適合複數加法和減法,極座標形式通常更適合乘法和除法。為了將極座標形式的兩個向量相乘,我們必須首先將兩個模數或大小相乘,然後將它們的角度加在一起。
極座標中的乘法
$$ Z _ { 1 } \times Z _ { 2 } = A _ { 1 } \times A _ { 2 } \angle \theta _ { 1 } + \theta _ { 2 } $$
6∠30o 和 8∠-45o 在極座標下的乘法如下,
$$ Z _ { 1 } \times Z _ { 2 } = 6 \times 8 \angle 30 ^ { \circ } + \left( - 45 ^ { \circ } \right) = 48 \angle - 15 ^ { \circ } $$
極座標除法
同樣,為了將極座標形式的兩個向量相除,我們必須將兩個模數相除,然後減去它們的角度。
$$ \begin{array} { c } { \frac { Z _ { 1 } } { Z _ { 2 } } = \left( \frac { \mathrm { A } _ { 1 } } { \mathrm { A } _ { 2 } } \right) \angle \theta _ { 1 } - \theta _ { 2 } } \ { \frac { Z _ { 1 } } { Z _ { 2 } } = \left( \frac { 6 } { 8 } \right) \angle 30 ^ { \circ } - \left( - 45 ^ { 0 } \right) = 0.75 \angle 75 ^ { \circ } } \end{array} $$
幸運的是,今天的現代科學計算器已經建立了數學函式,可以很容易地將矩形轉換成極座標形式( R→P),然後從極座標轉換成矩形,( R→P)。
使用指數形式的複數
到目前為止,我們已經學習了矩形形式的複數 a + jb 和極座標形式 A∠±θ,但是還有第三種表示複數的方法,它類似於對應於正弦曲線的長度(幅度)和相位角的極座標形式,但使用自然對數的基數,e = 2.718 281 .. 來求複數的值。第三種方法稱為指數形式。
指數形式使用正弦 sin 和餘弦 cos 值來定義復指數為複平面上的旋轉點。尋找點的位置的指數形式基於尤拉恆等式,以瑞士數學家 Leonhard Euler 的名字命名,具體如下:
$$ \begin{array} { c } { Z = A e ^ { j \phi } } \\ { Z = A ( \cos \phi + j \sin \phi ) } \end{array} $$
然後尤拉恆等式可以通過複平面中的以下旋轉相量圖來表示。

我們可以看到,尤拉公式是非常類似於上面的極座標形式,一個數字,如 Aejθ ,它的幅值是 1,也是一個複數。我們不僅可以容易的將複數是的指數形式轉換成極座標形式,例如: 2 ej30 =2∠30,10 ej120 =10∠120 或 -6 ej90 =-6∠90,但尤拉恆等式也為我們提供了一種將複數從指數形式轉換為矩形形式的方法。然後,定義複數的指數,極座標和矩形之間的關係如下,
複數形式
$$ \mathrm { Z } = \mathrm { x } + \mathrm { jy } = \mathrm { A } \angle \theta = \mathrm { A } ( \cos \phi + j \sin \phi ) $$
相量表示法
到目前為止,我們已經研究了使用複數來表示複平面上的點的旋轉向量或靜止向量的不同方式。相量符號是構造具有給定正弦波形的幅度和相位角的單個複數的過程。
然後,有時稱為相量符號或相量變換,將正弦函式的實部: A(t) = Am cos(ωt±Φ) 從時域轉移到複數域,也稱為頻域。例如:
$$ \mathrm { V } _ { ( t ) } = \mathrm { V } _ { \mathrm { m } } \cos ( \omega \mathrm { t } + \theta ) \quad \Leftrightarrow \quad \text { Euler’sidentity: } \mathrm { e } ^ { \mathrm { t } \mathrm { j } \theta } = \cos \theta \pm \mathrm { j } \sin \theta \\ $$
舉例如下,
$$ \mathrm { V } _ { ( \mathrm { t } ) } = 20 \cos \left( \omega \mathrm { t } + 30 ^ { \circ } \right) \mathrm { volts } \Rightarrow \left( \frac { 20 } { \sqrt { 2 } } \right) \angle 30 ^ { \circ } \Rightarrow \mathrm { V } _ { \mathrm { RMS } } = 14.14 \angle 30 ^ { \circ } \\ \mathrm { V } _ { ( \mathrm { t } ) } = 35 \cos \left( \omega \mathrm { t } + 45 ^ { \circ } \right) \mathrm { Volts } \Rightarrow \left( \frac { 35 } { \sqrt { 2 } } \right) \angle 45 ^ { \circ } \Rightarrow \mathrm { V } _ { \mathrm { RMS } } = 24.75 \angle 45 ^ { \circ } \\ \mathrm { V } _ { ( \mathrm { t } ) } = 35 \cos \left( \omega \mathrm { t } + 45 ^ { \circ } \right) \mathrm { Volts } \Rightarrow \left( \frac { 35 } { \sqrt { 2 } } \right) \angle 45 ^ { \circ } \Rightarrow \mathrm { V } _ { \mathrm { RMS } } = 24.75 \angle 45 ^ { \circ } \\ \mathrm { V } _ { ( \mathrm { t } ) } = 100 \cos ( \omega \mathrm { t } ) \text { Volts } \Rightarrow \left( \frac { 100 } { \sqrt { 2 } } \right) \angle 0 ^ { \circ } \Rightarrow \mathrm { V } _ { \mathrm { RMS } } = 70.72 \angle 0 ^ { \circ } $$
請注意, 1/√2 將最大幅值轉換成有效值 或 RMS 值。
複數概述
然後總結本教程關於複數在電氣工程中的使用。
- 複數由兩個不同的數字組成,一個實數加上一個虛數。
- 通過使用 j 運算子將虛數與實數區分開來。
- 前面帶有字母
j的數字將其標識為複平面中的虛數。 - 根據定義,j 運算元 $j \equiv \sqrt { - 1 }$j≡√-1
- 虛數可以加,減,乘,除,這與實數相同。
j乘以j得到 j2 = -1- 在矩形形式中,複數由複平面上的空間中的點表示。
- 在極座標形式中,複數由線表示,線的長度是幅度和相角。
- 在指數形式中,複數由線和相應的角度表示,該角度使用自然對數的基數。
- 複數可以用以下三種方式之一表示:
- Z = x + jy » 矩形
- Z =A∠Φ » 極座標形式
- Z = AejΦ » 指數形式
- 尤拉恆等式可用於將複數從指數形式轉換為矩形。
在之前的教程中,我們已經看到我們可以使用相量來表示正弦波形,並且它們的幅度和相位角可以以複數的形式寫出。我們還看到複數可以以矩形、極座標或指數形式呈現,每個複數代數形式之間的轉換包括加,減,乘和除。
在接下來的幾個與 AC 串聯電路中相量關係相關的教程中,我們將研究一些常見無源電路元件的阻抗,並繪製流過元件的電流和施加電壓的相量圖。我們從 AC 阻抗開始。